










































Blog
Ende der Trumpeltieramtszeit in:
am 20.01.2021 ab Punkt zwölf Uhr ist Schluss mit dem Unsinn.
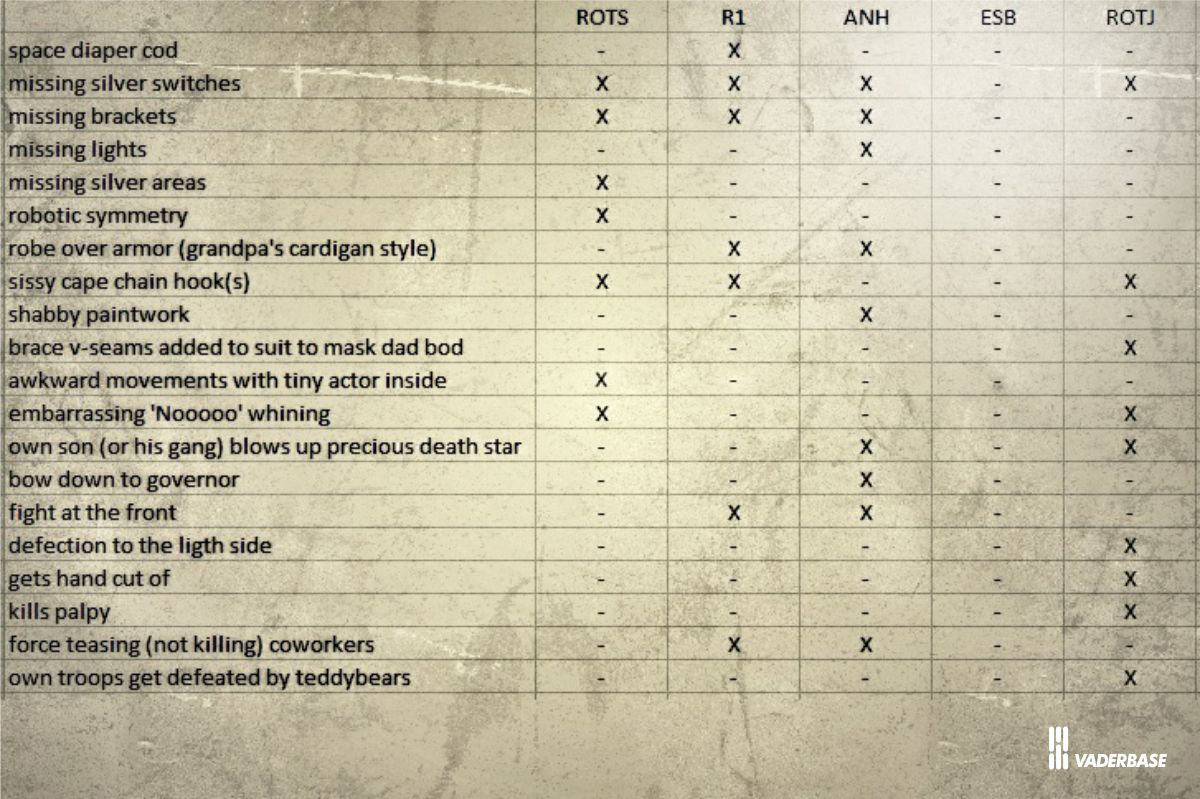
16.10.2020 Gernot Hassknechts subtile Kritik an den Sequäls
05.10.2020 Harrope Kamera Slider S1 und S2 - Schrittmotorenprobleme gelöst
Ich habe den Harrope Slider günstig gebraucht bekommen und Kamerafahrten
in Echtzeit gefilmt: perfekt. Als ich dann Einzelbilder per Timelapse
fotografierte, um die Belichtungszeit deutlich zu erhöhen (1 Sekunde statt
1/30 Sekunde) für rauschfreie Bilder mit ISO 100 bei maximal geschlossener
Blende für hohe Tiefenschärfe, stellte ich fest, dass der aus den
Einzelbildern zusammengestellte Film hin und wieder sichtbar ruckelte. Zudem
kam es bei manchen Konstellationen aus Kameraschlittenstrecke und Anzahl der
Fotos vor, dass der Schlitten deutlich vor dem geplanten Endpunkt anhielt
und beim Zurückkehren sogar gegen den Anschlag zurückfuhr. Ich konnte mir
dieses Verhalten nicht erklären und unternahm dutzende Versuche, die
ergaben, dass manchmal die Kamerafahrt wie vorgesehen bis zum Ende
durchgeführt wurde und manchmal aber vorher bereits endete. Dieses Verhalten
war bei annähernd gleicher Strecke und gleicher Anzahl der Auslösungen
identisch aber eine leichte Änderung auch nur eines Parameters änderte die
Abweichung mal ein wenig und scheinbar linear und mal drastisch und klar
nicht linear. Ich prüfte die Spannung des Antriebsriemens, die
Leichtgängigkeit der Räder und die exakte Ausrichtung der Stangen. Nichts
half. Schließlich installierte ich einen Schrittmotor mit einer Untersetzung
von 1:100, um die Abweichungen im Verhältnis zur Strecke zu minimieren. Das
führte zu sehr langen Zeiten für die Einstellung der Fahrten und das Ruckeln
blieb.
Lösung: Ein Schrittmotor macht mit ein- und zweiphasigen
Vollschritten 200 Schritte pro Drehung. Bei Kombination von ein- und
zweiphasigen Schritten kommt man auf 400 Schritte pro Drehung. Dieses
Kombination aus Vollschritten führt somit zu den Halbschritten. Vollschritte
sind kräftig und konstant. Mikroschritte werden jedoch nicht mit
Vollschritten/ ganzen Phasen erreicht, sondern mit der phasenversetzten
Erregung der Spulen. Damit können bei 1/8 Schritten 1600 Schritte pro
Drehung und bei 1/16 Schritten 3200 Schritte pro Drehung erzielt werden.
Hier wird die ganze Bewegung viel sanfter und geschmeidiger. Aber leider
führt die phasenverschobene Erregung dazu, dass die Kraft der Spulen
geringer wird und zudem wird die Präzision deutlich schlechter, weil die
genaue Position nicht exakt ist und viel schlimmer noch es immer wieder zu
Schrittverlusten kommt, die zu allem Übel auch noch wieder aufgeholt werden,
so dass am Ende die Schritte und Strecken zwar passen, aber die es zu
Aussetzern und unpräzisen Schritten kommt. Dieses Verhalten wird u.a. durch
die bei längeren Fahrten entstehende Selbstinduktion und Magnetisierung der
Spulen etc. hervorgerufen. Resultat: die Filme ruckeln hin und wieder.
Also habe ich die Steuerung des Harrope modifiziert und den A4988 Treiber an
den MS1 bis MS3 mit einem Schalter versehen, um zwischen Vollschritt,
Halbschritt und Achtelschritt wechseln zu können. Halbschritt ruckelt bei
einer langsamen Echtzeitkamerafahrt sehr und ist dafür ungeeignet. Für
perfekte Einzelbildaufnahmen ist dieser Modus aber 100% tauglich. Für
Echtzeitkamerafahrten stelle ich den Dipswitch auf Achtelschritt (MS1 high,
MS2 high, MS3 low), um auch hier perfekte Ergebnisse zu erhalten.
Zusätzliche Bonuserklärung der verkürzten Fahrten (die aber nichts mit dem
Ruckeln zu tun haben):
der Treiber kann stets nur ganzzahlige Schritte
vornehmen (sei es ein Vollschritt oder ein Achtelschritt). Wenn nun die
Strecke z.B. 70 cm beträgt, so sind das im Vollschrittmodus (A4988 MS1 low,
MS2 low, MS3 low) mit einem GT2 Zahnriemen und einer 20-Zahnrolle 50
Schritte pro Zentimeter = 3.500 Schritte auf der Strecke. Wenn ich nun genau
3.500 Fotos schieße sind das exakt 1 Schritt pro Bild. Bei aber nur 1.000
Fotos sind das 3,5 Schritte pro Bild. Folge 0,5 Schritte Abweichung pro Bild
x 1000 = 500 Schritte Abweichung. Diese Systematik gilt für alle
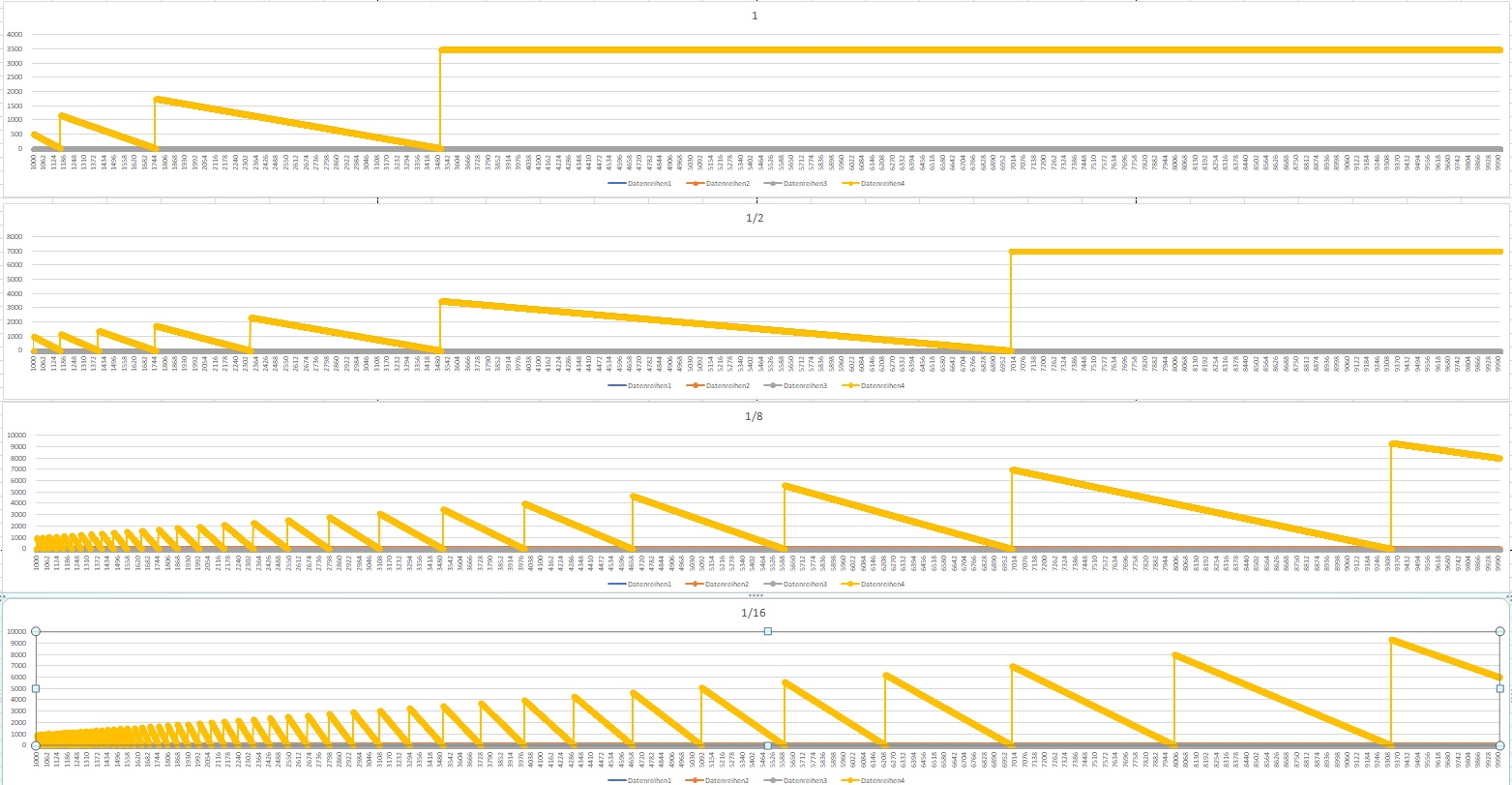
Schrittarten, Strecken und Fotoauslösungen. Ich habe eine
excel-Tabelle erstellt,
um hier die Zusammenhänge aufzuzeigen. Ich kann somit besser die passende Zahl
(geringste Abweichung rechnerisch/ Graph trifft x-Achse) besser etwas unterschreiten, um die Abweichung zu minimieren
(denn bei einer Überschreitung nimmt die Abweichung plötzlich stark zu) oder
ich lassen den Schlitten weiter fahren als benötigt, um hier genug
Sicherheitspuffer zu erhalten. Leider kann ich die exakten Schritte bei der
Hinfahrt nicht vom Steuergerät auslesen, das könnte die Arbeit erleichtern.
Aber eine angemessen genaue Schätzung reicht auch aus.
04.10.2020 Zhiyun Crane 2
Ein Schwebestativ. Das wollte ich schon immer mal haben, aber die Preise
waren zu hoch für elektronische Gimbals und die mechanischen waren mir zu
unpraktisch. Zhiyun hat mit dem Crane ein tolles Gerät herausgebracht und
die Konkurrenz erschüttert mit Qualiät und niedrigen Preisen. Zudem hat
Zhiyun ständig neue Gerät herausgebracht, die dafür sorgten, dass sogar die
eigenen Vorgängerprodukte schnell noch viel billiger wurden. Also her mit
einem gebrauchten Crane 2 für 200 Euro, dazu ein Servomotor für 40 Euro.
Zunächst einmal war ich extrem verwirrt über die ganzen Modelle von Zhiyun:
Crane, Crane V2, Crane Plus, Crane 2, Crane 3, Crane 2S, Crane 3S, 3S-E,
3S-Pro, Lab, Smartsling, Easysling, Weebill... dazu noch die kleineren
Dinger fürs Handy oder leichte Systemkameras (Smooth X, XS, 2, 3, 4, C, Q2,
M, M2). Für DSLR sind nur die Cranes interessant: der erste Crane war super,
aber ohne Display, V2 etwas besser (trägt mehr Gewicht) und Crane 2
der Kracher mit Display, Vortexmodus und extra Drehrad für den Servomotor.
Zwar kann das Drehrad auch die Schärfe direkt ohne extra Servomotor
ansteuern, aber nur bei richtig fetten Profikameras wie der Canon 5D Mark II
aufwärts. Für meine Canon 100D muss der Servomotor vorne angebaut werden und
das geht genauso gut. Zudem könnte ich per Gimbal auch die
Kameraeinstellungen ändern (ISO, Blende etc.), aber das brauche ich nicht.
Das Stativ muss auf Firmware v1.77 gebracht werden (das ging leicht per
Homepage von Zhiyun), aber damit die ABpoint Funktion für den Servo auch
klappt, muss die Firmware für den Follow Focus Servo des Crane 2 auf Version
v 1.71 gebracht werden. Diese Info und auch die Firmware habe ich von der
Zhiyun Support Facebookseite innerhalb von Minuten erhalten. Top Service
aber noch besser wäre es, wenn das auf der Homepage ersichtlich wäre. Die
ABpoint Funktion sorgt dafür, dass der Servo per Drehrad am Gimbalgriff nur
zwischen diesen beiden Werten bewegt wird, damit kann die Präzision beim
Fokussieren dramatisch erhöht werden. Damit ich besser sehen kann, was
gerade fokussiert wird, habe ich auf der Canon 100D die Firmware Magic
Lantern installiert: die Fokus Peaking Funktion ist spitze und auch das
Overlay im aktivierten Videomodus hilft sehr (im Original sind bei laufender
Videoaufnahme keine Hilfslinien mehr sichtbar). Die Geschwindigkeit der
Drehungen (beim Vortexmodus interessant) kann nur per App auf dem Handy, das
sich per Bluetooth mit dem Crane verbindet, geändert werden (Presets für zu
Fuß, per Fahrrad, gehen, laufen etc.).
Der neuere Crane 3 hat zwei
Servos, die Fokus und Zoom von jeder Kamera steuern können (dazu gibt es
Knöpfe an den Griffen des Gimbals), aber der Crane 3 ist mir für den
Einstieg noch zu teuer. Für einen Vertigo Effekt/ Dollyzoom reicht der Crane
2 mit dem einen Servo aus, den ich dann statt auf dem Schärfering einfach am
Zoomring anbringe. Mit einem 10mm Weitwinkel ist der Schärfebereich nur mit
sehr kurzen Wegen verbunden und daher ist hier sicher eine mittige Schärfe
ggf. auf per Autofokus oder eine kleinere Blende für weitgehendere
Schärferäume die bessere Wahl. Aber wenn ich Videos mit meinem alten,
umgebauten Canon FL 1.2 55 mm (Edmika EF Umbau) drehen möchte (das Objektiv
hat natürlich keinen Autofokus), ist der Servo perfekt. ;Material und
Funktionen des Crane 2 erscheinen mir erstklassig, die Software und die Home
eher chaotisch, der Support jedoch wiederum sehr gut. Empfehlung.
Jetzt
habe ich das schwere, alte Uranglasobjektiv von vor 60 Jahren ausprobiert
und leider fing der Crane 2 nach wenigen Sekunden an, zu vibrieren und sich
zu schüttlen. Das lag nicht an der Strahlung des Altglases, sondern an der
Einstellung der Motoren: 'stark' war zuviel, also flugs auf 'schwach'
gestellt und alles ist wieder geschmeidig.
29.05.2020 Rasenmäherdroide Erfahrungen Bericht Test Landxcape LX 790
Jahrelang, ja was sag' ich, jahrezehntelang habe ich mir keinen
Rasenmähroboter gekauft, obwohl ich seit dem Automower G1 1998 damit
geliebäugelt habe und das vierzehntägige oder bei guter Düngung sogar
wöchentliche Rasenmähen mit meinem 6 PS Partner P53 625 Benzinmäher (sogar
mit Mulchfunktion, elektrischem Starter und angetriebener Achse) nicht
gerade liebte wegen der Zeit, der Anstrengung, dem Lärm, der Reinigung, dem
Benzinkaufen, dem Gestank und dem Lärm und dem Lärm. Habe ich den Lärm
bereits erwähnt?
Ich möchte an dieser Stelle betonen, dass der
Partner P53 mich während der fast zehn Jahre Dauernutzung noch nie im Stich
gelassen hat: startet immer sofort (nicht so wie diese Mistdinger vorher,
die nicht enden wollendes Gereisse am Starterseil benötigten, bis sie denn
mal starteten) und war noch nie defekt. Die zentrale Höhenverstellung
funktioniert auch perfekt. Kein Wartung, keine Reparatur, nur in jeden 5
Literkanister immer eine kleine Portion Liqui Moly 5107 Benzin Stabilisator
(Benzin wird sonst gerne mal schlecht nach sechs Monaten) und gut ist.
Nun aber haben wir für die Kinder auch wegen der Coronakrise ein
zweites, gigantisches 490 cm Trampolin im Garten aufgebaut. Das Trampolin
ist so groß, dass ich es nicht an andere Stellen auf dem Rasen ziehen kann,
um dort zu mähen. Das ist nicht im Gewicht begründet, sondern darin, dass
das Riesentrampolin sich bei geringster Bewegung über den Rasen (wenn ich
daran ziehe) augenblicklich hochwellt wie eine alte Scheibe Graubrot und
verzieht. Dann muss man ich alle 120 Federn
entfernen, neu aufstellen und die Federn nach festem Muster wieder
installieren. Beim 300 cm Trampolin kam das nie vor (weil es kompakter ist).
Nun hatte ich also keine Möglichkeit mehr, unter der riesigen
Trampolinfläche zu mähen, ohne das Schiebegestänge des Rasenmähers abzubauen
und selbst samt knatterndem Stinkemäher unter das Trampolin zu kriechen. Das
habe ich einmal gemacht, um dem Roboter den Weg zu ebnen (Robi kann
nicht mehr als sechs cm mähen) und nie wieder. Der Roboter sollte also vor
allem nun ins Spiel gebracht werden, um den Rasen unter dem Riesentrampolin
zu mähen und somit auch die in diesem Jahr vermehrt auftretenden Zecken im
Zaum zu halten.
Um zu illustrieren, was mich bisher davon
abgehalten hat, solch einen Rasenmähroboter zu kaufen, hier meine jahrelang
gepflegten Topbedenken, warum ein Mähroboter Mist ist:
• sehr teuer, schwach, nicht haltbar, flatteriges Plastikgelumpe, sehr aufwendige Installation des Begrenzungskabels, unklare Installation von Inseln in der Mähzone, unklare Möglichkeit, durch Pflasterung komplett abgetrennte Rasenfläche zu verbinden, Angst vor festgefahrenem Roboter, Angst vor einem Roboter, der nicht mit den Steigungen im leider nicht mehr ganz planen Garten zurecht kommt, Angst vor einem Rasenmäher, der einfach wegfährt oder gestohlen wird, Angst vor einem Rasenmäher, dessen billiges, schwaches Plastikmechanikschnibbelwerk vom Aufsetzen auf einem Maulwurfshügel zerstört wird, Angst vor komplizierter Programmierung von Mähzeiten und Zonen, Angst vor lückenhaftem Mähergebnis ohne aufwendige Laser-, Lidar-, Radar- KI-, Ultraschall-, Kartografietechnik.
Da ich schon sehr viel Geld mit vermeintlich nützlichen in der Praxis
aber leider unpraktischen elektronischen Gadgets in allen Lebensbereichen in
den Sand gesetzt habe, war ich bei dieser Investition immer sehr kritisch.
Nun aber musste eben so ein Teil her wegen des Trampolins. Da der
Einstiegspreis nun auch sehr viel vertretbarer als früher erschien (285 EUR
inklusive aller Installtionsgegenstände wie Ladestation, Kabel und Heringen
gegenüber früher, wo mindestens 1.000 EUR aufzubringen waren) legte ich
einfach mal los:
Landxcape LX790. Installation des
Kabels: auf den Boden legen, jeden Meter einen Hering in die Erde petten,
fertig. Zunächst habe ich ungeduldig einen kleinen, rechteckigen Bereich
grob abgesteckt, um einfach erst einmal alles testen zu können (ohne
geschlossenen Kabelstromkreis fährt Robi keinen Zentimeter). Kabelende in
die Ladestationsbuchse (der Anschluss sieht aus wie eine einfache
Lautsprecherklemme), zack ändert sich bei geschlossenem Stromkreis die
Ledfarbe der Station von rot auf grün. Robi anschalten, Start und ok
drücken, schon geht's los. Der Robi ist sehr leise und mäht tatsächlich
wirklich prima. Die drei Messerchen und die ganze Plastiklandschaft unter
dem Robi wirkt im Vergleich zum stahlharten Bezinrasenmäher wie ein
Spielzeug, aber als der Robi über einen am Heckenrand vergessenen
Kreisregner fetzte (aus Aluminium und Druckgussmetall) bekam ich
augenblicklich Respekt vor der Zerstörungskraft des Robimähwerks, denn das
waren ganz beachtliche Schrammen und Späne am Regner erkennbar. Robi fuhr
leider auf die unteren Querstangen der Trampoline und das metallische
Krachen ließ mich befürchten, dass nun Messer und Mähwerk defekt sein
könnten. Aber nichts da, die Klingen sind zwar etwas heruntergeschliffen,
aber das Mähen funktioniert nach wie vor tadellos. Also habe ich nun die
Stützen der Trampoline zehn cm eingegraben, damit Robi bequem
durchfahren kann.
Der Landscape LX790 fuhr sich bisher nur fest, wenn
der Untergrund zu lose war (loses Schreddermaterial in mehreren cm Dicke
unter der Hecke) oder wenn das Vorderrad an einer Kante zwischen Rasen und
Pflasterung feststeckte. Die Kante habe ich einfach der Stelle
heruntergertrampelt und das lose Schreddermaterial habe ich entfernt.
Seitdem fuhr Robi kostant seine Arbeitseinsätze. Perfekt.
Anfangs fuhr
Robi leider nur eine Stunde am Tag (und das auch nur Montag bis
Freitag) und das war etwas knapp bemessen für die über 500 m2
Rasenfläche. Ein Update später (der Hersteller hört offenbar aufmerksam
seinen Kunden zu auf z.B.
www.roboter-forum.com und verbessert sogar die bereits verkauften Geräte
nachträglich gratis) jedoch fährt Robi nun zwei Stunden am Tag.
Klasse gemacht. Wenn das mal nicht reichen sollte (kam bei mir noch nicht
vor): einfach Start und ok drücken und er fährt nochmals los.
Die
Insel im Rasen (Haselnussstrauch mit Pflasterung drumherum)
ist leicht erstellt: Kabel hinführen, Insel umfassen und eng am hinführenden
Kabel zurückführen. Die beiden Magnetfeldsignale heben sich auf und Robi
fährt über das Doppelkabel herüber und beachtet dennoch die Begrenzung der
Insel. Wenn es regnet (zwei Metallkontakte am Heck werden benetzt und Strom
wird detektiert) sucht Robi das Kabel und fährt entgegen dem Uhrzeigersinn
bis zur Ladestation. Nciht, weil Robi etwa nicht wasserfest wäre, sondern um
den Rasen zu schonen und das Mähwerk vor unnötig festklebenden Rasenresten
zu schützen.
Trickreich: wenn Robi zufällig bei der Kabelsuche für die
Rückfahrt (wegen Regen oder leerer Batterie) auf die Insel trifft, fährt er
erst einmal locker dreimal im Kreis. Dann jedoch signalisiert das
wiederkehrende Bewegungsmuster inklusive der 360 Grad Drehung dem Robi, dass
er offenbar auf einer Insel gelandet ist. Dann löst er sich von dem
Inseldraht und versucht es nochmals bei dem (hoffentlich) richtigen
Außendraht. Geniale Technik.
Wenn Robi irgenwo
gegenfährt oder die Räder doch mal etwas durchdrehen, befreit sich Robi
geduldig und stets erfolgereich durch mehrmaliges Vor- und Zurückmanövrieren
aus der Situation.
Um das von der Pflasterung abgetrennte
Rasenstück mit in Robis Gebiet zu integrieren, habe ich zwei
schmale Streifen der Steine vorsichtig entfernt (Gartenhandschaufel in die
Fuge gefummelt und lange herumdrücken), das Kabel in den Sand gelegt, Löcher
in die seitlichen, festbeonierten Rasenbordsteine gebohrt, Kabel
durchgesteckt und alles wieder an den alten Stellen festklopfen.
Robi
braucht gemäß Anleitung einen Korridor von mindestens 100 cm
zwischen den Außenkabeln: ich habe zwischen Gartenhaus und
Pflasterung nur 70 cm und dennoch taumelt Robi zielsicher da durch, stößt
auf einen weiteren Rasenstreifen, mäht diesen (wie immer nur nach dem
Zufallsprinzip) und torkelt irgendwann wieder durch den Korridor
zurück aufs Hauptfeld. Perfekt.
Fazit: Robi macht seine Arbeit
zuverlässig. Mein Rasen sieht konstant aus, wie frisch gemäht.
Keine meiner Bedenken hat sich bewahrheitet. Rasenmäherroboter sind offenbar
ausgreift. Sollte Robi mal nach drei Jahren kaputt sein oder gestohlen
werden (wer macht denn so etwas? 285 EUR inklusive
Installationsmaterial... der Roboter hat also einen Neuwert von weniger als
200 EUR und nach einer Woche Einsatz sieht er eher nach 50 EUR aus mit
seinen ganzen ehrenvollen Kratzern und Staubschichten. Dazu ja noch die
Sicherung per PIN), hat er sein Geld für mich jedoch bereits dreimal wieder
verdient. Drei Jahre Garantie sind zudem auch noch zur Beruhigung vorhanden.
Akku und Messer natürlich ausgenommen. W-Lan, App, Zonen und diesen
ganzen Tüdelüt und auch Ultraschallsensoren oder
Vermessung für exakte Mährouten statt Zufallsprinzip vermisse ich
null. Der interne Anstoßsensor und der Anhebesensor funktionieren perfekt.
Auch die filigranen Ersatzmesser (mit Schrauben) sind nicht
wie von mir befürchtet teuer wie Druckerpatronen oder Markenrasierklingen:
sogar drei (!) Austauschsätze, also neun Klingen plus stets mit
auszuwechselnde Schrauben sind bereits beim Gerät mit dabei.
Das
Begrenzungskabel habe ich mittlerweile (nachdem ich nun sicher bin, dass der
Robi ein tolle Sache ist) etwas genauer an die Kurven und
Ausbuchtungen der Rasenflächen angepasst und verlängert (Kabel
verlötet, Schrumpfschlauch drüber und
selbstverschweissendes Silikonband herumgewickelt statt der
beigelegten Quetschverbinder für maximale Zuverlässigkeit der Verbindung)
und vielleicht werde ich das Rasenstück vor dem Haus, das direkt an die
Straße angrenzt, auch noch integrieren (ich hoffe nur, dass der Postbote
nicht unseren Robi anfährt). Lediglich ab und zu nehme ich den
Kantenschneider zur Hand, um einige kleine Büschel an den
Trampolinbeinen oder an anderen schwer zugänglichen Stellen zu korrigieren.
99,99 % der Flächen jedoch sehen konstant überwältigend supergepflegt aus.
Da Robi täglich fährt, muss er immer nur einige, wenige Millimeterchen
abmähen und mulchen. Daher sieht man keine Rasenreste. Top
Empfehlung.
Nachtrag: Robi war heute leider etwas lauter als
sonst. Herumgedreht und siehe da: eines der Messerchen war wegen Schmutz und
Rasenresten fest und nach innen gedreht. Einfach den Schmutz weggefummelt
und das Messer ist wieder außen. Unwucht somit in zehn
Sekunden beseitigt, Rob ist wieder sonntagstauglich leise (sonntags nur
manueller Start möglich, da Robi nur für Arbeit von Montag bis Freitag
programmiert ist und sich dieses leider nicht ändern lässt).
Die Nikodama Sticky Blinking Eyeballs machen den LX790 sogar noch besser.
Als wären diese sinnfreien, hightechverbrunzenden, per Bluetooth sich
synchronisierenden Quatschdinger Augen genau für unseren Robi
Rasenmäherroboter gemacht.
23.02.2020 Videoclip zum Konzert im Kulturpalast Dresden
Mit einem Selfie mit Nina Eichinger am Ende. :-)
12.01.2020 Dresdner Kulturpalast Sound of John Williams and Hans Zimmer
Nina Eichinger, das Pilsen Philharmonic Orchestra und Christian Schumann.























Komme Auf Die
Dunkle Seite Der Macht!